







保定焊接機器人-保定焊接機器人租賃-天津理想動力(多圖)
天津理想動力科技有限公司
經營模式:生產加工
地址:天津市寧河區新華科技城B26-4
主營:天津打磨機器人,天津分揀機器人,天津焊接機器人
業務熱線:022-26521101

產品詳情
聯系方式
產品品牌:理想動力
供貨總量:不限
價格說明:議定
包裝說明:不限
物流說明:貨運及物流
交貨說明:按訂單
有效期至:長期有效
保定焊接機器人-保定焊接機器人租賃-天津理想動力(多圖)
天津碼垛機器人,碼垛機器人,天津焊接機器人
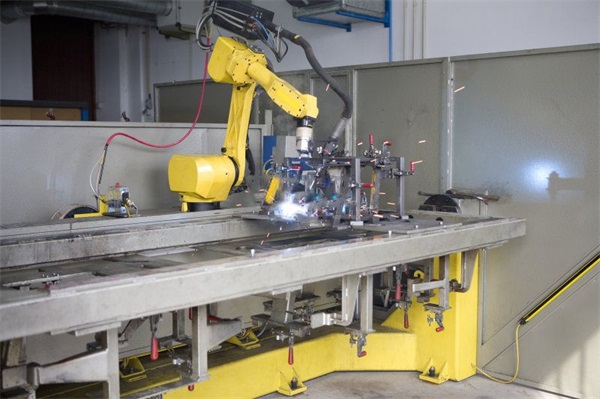
點焊機器人手臂上所握焊包括電極,電纜、氣管,冷卻水管及焊接變壓器,點焊機器人機械手配件較多,所以點焊機器人的焊相對比較重,會要求手臂的負重能力強。點焊機器人需要有足夠的負載能力才能支撐。點焊機器人是什么?而現在采用直流后交流伺服電機驅動方式已滿足要求,其重復定位精度可達到+0.30~土1mm,質量確保一致,因此在工業機器人中仍占有較大的比例。









定期維護:按照機器人制造商的建議,制定一個定期維護計劃,并確保按時執行。這包括清潔、潤滑、更換磨損部件等。
培訓操作人員:讓操作人員接受相關的培訓,熟悉機器人的操作、編程和維護知識。合格的操作人員能夠正確操作機器人,并及時發現并解決潛在問題。
環境條件:為焊接機器人提供適宜的工作環境。保持周圍空氣清潔,避免灰塵、水分和其他污染物進入機器人系統。保持適宜的溫度和濕度,以確保機器人正常運行。
安全措施:安全措施包括安裝防護罩、安全光幕、急停按鈕等,以保障操作人員和設備的安全。保持機器人周圍的工作區域清晰并標識明確的警示標志。

1、工作負載和工作范圍:根據焊接任務的工作負載和工作范圍確定外部軸的承載能力和運動范圍。外部軸應能夠承受焊接工件的重量,并提供足夠的運動自由度以覆蓋焊接區域。
2、焊接姿態要求:焊接任務可能需要在不同的姿態下進行,如平面焊接、立體焊接等。根據焊接姿態的要求選擇外部軸的類型和運動方式,確保能夠實現所需的姿態調整和工作靈活性。
3、焊縫形狀和長度:焊縫的形狀和長度對外部軸的選配也有影響。較長或復雜的焊縫可能需要更大的工作范圍和靈活性,因此需要選擇具備適當尺寸和運動能力的外部軸。


黎先生先生
手機:18622365088



